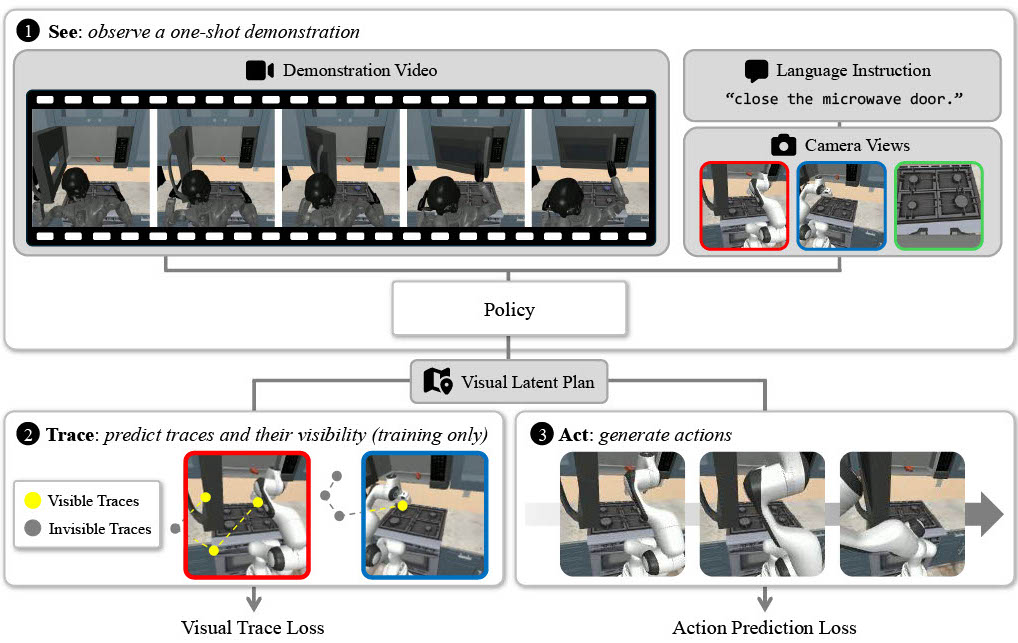
SeeTraceAct: Visibility-Aware Latent Planning from Cross-Embodiment Demonstration Videos
A demo-conditioned VLA framework that improves spatial grounding through visibility-aware prediction of future end-effector traces, evaluated on RoboCasa-DC and a real-world benchmark.